Dilution of precision (GPS)
Dilution of precision (DOP), or geometric dilution of precision (GDOP), is a term used in GPS and geomatics engineering to specify the additional multiplicative effect of GPS satellite geometry on GPS precision.
Contents |
Introduction
The concept of dilution of precision (DOP) originated with users of the Loran-C navigation system.[1] The idea of Geometric DOP is to state how errors in the measurement will affect the final state estimation. This can be defined as[2]:

Conceptually you can imagine errors on a measurement resulting in the  term changing. Ideally small changes in the measured data will not result in large changes in output location, as such a result would indicate the solution is very sensitive to errors. The interpretation of this formula is shown in the figure to the right, showing two possible scenarios with acceptable and poor GDOP.
term changing. Ideally small changes in the measured data will not result in large changes in output location, as such a result would indicate the solution is very sensitive to errors. The interpretation of this formula is shown in the figure to the right, showing two possible scenarios with acceptable and poor GDOP.
More recently, the term has come into much wider usage with the development and adoption of GPS. Neglecting ionospheric [3] and tropospheric[4] effects, the signal from GPS satellites has a fixed precision. Therefore, the relative satellite-receiver geometry plays a major role in determining the precision of estimated positions and times. Due to the relative geometry of any given satellite to a receiver, the precision in the pseudorange of the satellite translates to a corresponding component in each of the four dimensions of position measured by the receiver (i.e. x, y, z, and t). The precision of multiple satellites in view of a receiver combine according to the relative position of the satellites to determine the level of precision in each dimension of the receiver measurement. When visible GPS satellites are close together in the sky, the geometry is said to be weak and the DOP value is high; when far apart, the geometry is strong and the DOP value is low. Consider two overlapping rings, or annuli, of different centres. If they overlap at right angles, the greatest extent of the overlap is much smaller than if they overlap in near parallel. Thus a low DOP value represents a better GPS positional precision due to the wider angular separation between the satellites used to calculate a GPS unit's position. Other factors that can increase the effective DOP are obstructions such as nearby mountains or buildings. DOP can be expressed as a number of separate measurements. HDOP, VDOP, PDOP, and TDOP are respectively Horizontal, Vertical, Positional (3D), and Time Dilution of Precision. They follow mathematically from the positions of the usable satellites. GPS receivers allow the display of these positions (skyplot) as well as the DOP values.
The term can also be applied to other location systems that employ several geographical spaced sites. It can occur in electronic-counter-counter-measures (electronic warfare) when computing the location of enemy emitters (radar jammers and radio communications devices). Using such an interferometry technique can provide certain geometric layout where there are degrees of freedom that cannot be accounted for due to inadequate configurations.
The effect of geometry of the satellites on position error is called geometric dilution of precision and it is roughly interpreted as ratio of position error to the range error. Imagine that a square pyramid is formed by lines joining four satellites with the receiver at the tip of the pyramid. The larger the volume of the pyramid, the better (lower) the value of GDOP; the smaller its volume, the worse (higher) the value of GDOP will be. Similarly, the greater the number of satellites, the better the value of GDOP.
Meaning of DOP Values
| DOP Value | Rating | Description |
|---|---|---|
| 1 | Ideal | This is the highest possible confidence level to be used for applications demanding the highest possible precision at all times. |
| 1-2 | Excellent | At this confidence level, positional measurements are considered accurate enough to meet all but the most sensitive applications. |
| 2-5 | Good | Represents a level that marks the minimum appropriate for making business decisions. Positional measurements could be used to make reliable in-route navigation suggestions to the user. |
| 5-10 | Moderate | Positional measurements could be used for calculations, but the fix quality could still be improved. A more open view of the sky is recommended. |
| 10-20 | Fair | Represents a low confidence level. Positional measurements should be discarded or used only to indicate a very rough estimate of the current location. |
| >20 | Poor | At this level, measurements are inaccurate by as much as 300 meters with a 6 meter accurate device (50 DOP × 6 meters) and should be discarded. |
The DOP factors are functions of the diagonal elements of the covariance matrix of the parameters, expressed either in a global or a local geodetic frame.
Computation of DOP Values
As a first step in computing DOP, consider the unit vectors from the receiver to satellite i: 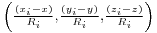 where
where  and where
and where  and
and  denote the position of the receiver and
denote the position of the receiver and  and
and  denote the position of satellite i. Formulate the matrix, A, as:
denote the position of satellite i. Formulate the matrix, A, as:
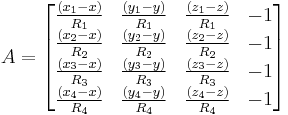
The first three elements of each row of A are the components of a unit vector from the receiver to the indicated satellite. If the elements in the fourth column are c which denotes the speed of light then the  factor is always 1. If the elements in the fourth column are -1 then the factor is calculated properly [5]. Formulate the matrix, Q, as:
factor is always 1. If the elements in the fourth column are -1 then the factor is calculated properly [5]. Formulate the matrix, Q, as:
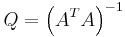
This computation is in accordance with Section 1.4.2 of Principles of Satellite Positioning where the weighting matrix, P, has been set to the identity matrix.
The elements of Q are designated as:
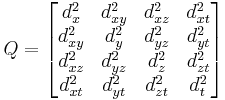
The Greek letter  is used quite often where we have used d. However the elements of Q do not represent variances and covariances as they are defined in probability and statistics. Instead, they are strictly geometric terms. Therefore, d, as in dilution of precision, is used. PDOP, TDOP and GDOP are given by:
is used quite often where we have used d. However the elements of Q do not represent variances and covariances as they are defined in probability and statistics. Instead, they are strictly geometric terms. Therefore, d, as in dilution of precision, is used. PDOP, TDOP and GDOP are given by:
in agreement with Section 1.4.9 of Principles of Satellite Positioning.
The horizontal dilution of precision,  , and the vertical dilution of precision,
, and the vertical dilution of precision,  , are both dependent on the coordinate system used. To correspond to the local horizon plane and the local vertical, x, y, and z should denote positions in either a north, east, down coordinate system or a south, east, up coordinate system.
, are both dependent on the coordinate system used. To correspond to the local horizon plane and the local vertical, x, y, and z should denote positions in either a north, east, down coordinate system or a south, east, up coordinate system.
References
Notes
- ^ Richard B. Langley (May 1999). "Dilution of Precision". GPS World. http://gauss.gge.unb.ca/papers.pdf/gpsworld.may99.pdf. Retrieved 2011-10-12.
- ^ Dudek, Gregory; Jenkin, Michael (2000). Computational Principles of Mobile Robotics. Cambridge University Press. ISBN 0-521-56876-5.
- ^ Paul Kintner, Cornell University; Todd Humphreys, University of Texas-Austin; Joanna Hinks, Cornell University (July/August 2009). "GNSS and Ionospheric Scintillation: How to Survive the Next Solar Maximum". Inside GNSS. http://www.insidegnss.com/node/1579. Retrieved 2011-10-12.
- ^ GPS errors (Trimble tutorial)
- ^ http://www.colorado.edu/geography/gcraft/notes/gps/gif/gdop.gif
{kind=link}
General
External links
- Article on DOP and Trimble's program: Determining Local GPS Satellite Geometry Effects On Position Accuracy.
- Notes & GIF image on manually calculating GDOP: Geographer's Craft
- Analysis and explanation of data related to GPS accuracy: David L. Wilson's GPS Accuracy Web Page