Image:Universal joint - output angle relative to input angle.png
From Wikipedia, the free encyclopedia
Size of this preview: 800 × 553 pixels
Full resolution (804 × 556 pixels, file size: 11 KB, MIME type: image/png)
| | This is a file from the Wikimedia Commons. The description on its description page there is shown below.
|
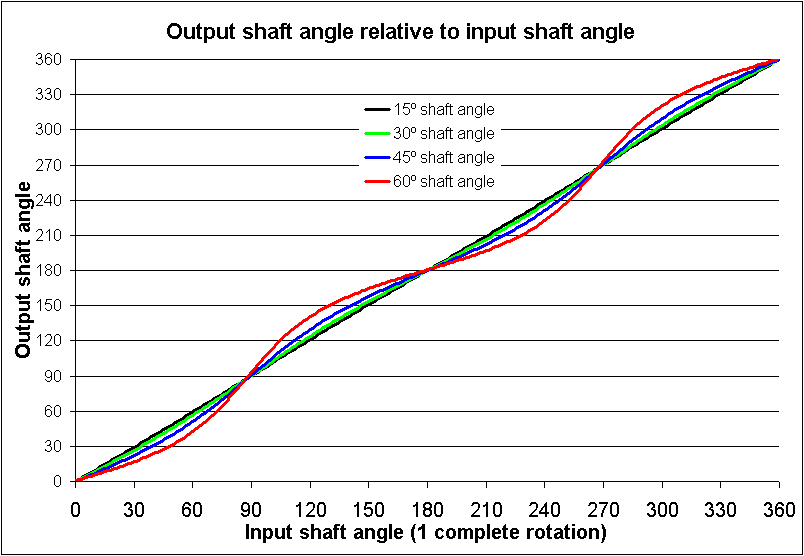
{{Information |Description=== Equation used: == Summation of ω2 for ω1 1 till 360

Where:
ω2 is the speed of the output shaft
ω1 is the speed of the input shaft, set to 1
β is the angle between the shafts
φ1 is the rotation angle of the input shaft
 |
This graph image should be recreated using vector graphics as an SVG file. This has several advantages; see Commons:Media for cleanup for more information. If an SVG form of this image is already available, please upload it. After uploading an SVG, replace this template with template {{Vector version available|new image name.svg}} in this image. |
|
العربية | Български | Català | Česky | Dansk | Deutsch | English | Esperanto | Español | Français | 한국어 | Italiano | Magyar | Lietuvių | Nederlands | 日本語 | Polski | Português | Română | Русский | Suomi | Svenska | Türkçe | Українська | Tiếng Việt | मराठी | 中文(繁體) | 中文(简体) | +/- |
|
(Original text : Output shaft angle relative to input shaft angle of a universal joint) |Source=Originally from en.wikipedia; description page is/was here.
(Original text : self-made) |Date=2006-08-28 (original upload date)
(Original text : created 2006-08-28) |Author=Original uploader was Van helsing at en.wikipedia
(Original text : [[:en:User:Van helsing) |Permission=Released into the public domain (by the author). |other_versions= }}
[edit] License information
| This image has been (or is hereby) released into the public domain by its author, Van helsing at the wikipedia project. This applies worldwide. In case this is not legally possible: |
|
This graph image should be recreated using vector graphics as an SVG file. This has several advantages; see Commons:Media for cleanup for more information. If an SVG form of this image is already available, please upload it. After uploading an SVG, replace this template with template {{Vector version available|new image name.svg}} in this image. |
|
العربية | Български | Català | Česky | Dansk | Deutsch | English | Esperanto | Español | Français | 한국어 | Italiano | Magyar | Lietuvių | Nederlands | 日本語 | Polski | Português | Română | Русский | Suomi | Svenska | Türkçe | Українська | Tiếng Việt | मराठी | 中文(繁體) | 中文(简体) | +/- |
|
[edit] Original upload log
(All user names refer to en.wikipedia)
- 2006-08-28 09:57 Van helsing 804×556×8 (11447 bytes) == Summary == {{Information| |Description = Output shaft speed relative to input shaft speed of a universal joint |Source = self-made |Date = created 2006-08-28 |Author = [[User:Van helsing|Van helsing]] |Permission = |other_versions = [[:Image:UJgraph.
File history
Click on a date/time to view the file as it appeared at that time.
| Date/Time | Dimensions | User | Comment | |
|---|---|---|---|---|
| current | 08:22, 26 March 2007 | 804×556 (11 KB) | Liftarn | ({{Information |Description=== Equation used: == Summation of ω<sub>2</sub> for ω<sub>1</sub> 1 till 360 :<math>\omega_2 = \frac{\omega_1\cos\beta}{1-\sin^2\beta\sin^2\phi_1}</math> Where: <br> ω<sub>2</sub> is the speed of the output shaft <br> ω<sub>) |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}