User:Freshgavin/Sandbox/Reference desk/Mathematics
From Wikipedia, the free encyclopedia
|
Welcome to the Wikipedia mathematics reference desk
|
|---|
How to ask a question
|
| If you have no problem following these guidelines, you can go ahead and ask a new question by clicking on this link. |
How to answer a question
|
|
Reference desk navigator
|
| Mathematics desk |
| Computers and technology desk |
| Language desk |
| Humanities desk |
| Science desk |
| Miscellaneous desk |
| Archives |
This template must be substituted. Replace {{Reference desk navigation}} with {{subst:Reference desk navigation}}.
|- ! width="20%" align="left" | < October 12 ! width="25%" align="center"|<<Sep | October | Nov>> ! width="20%" align="right" |October 14 > |}
|
||||||||
| The page you are currently viewing is an archive page. While you can leave answers for any questions shown below, please ask new questions at one of the pages linked to above. | ||||||||
[edit] Penrose tiling, and its Fourier transform
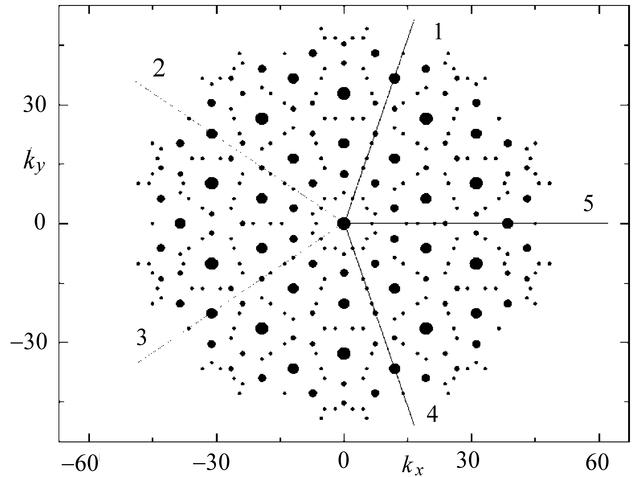
What does the 2D fourier transform of a penrose tiling look like? --HappyCamper 12:27, 13 October 2006 (UTC)
- I'd expect that instead of nice spikes at the relevant frequency vectors, there would be wild oscillation. Surely there would be something. Melchoir 19:02, 13 October 2006 (UTC)
- Probably, you need to be more specific about what you actually mean with a Penrose tiling, that is, how you intend to draw it on the plane. The article itself shows several different ways to do so. I think that if you draw them with infinitely thin lines, they would not have any impact at all in the Fourier transform, which would be just zero. And how about different colours? —Bromskloss 22:21, 13 October 2006 (UTC)
-
- This is an excellent question that deserves more than cop-outs. Here's an image (which, unfortunately, you might not be able to see without a subscription), and these articles also have some nice diagrams. —Keenan Pepper 06:37, 14 October 2006 (UTC)
-
-
- I'm sure it's a good question, I just don't know how the image is defined! —Bromskloss 20:16, 15 October 2006 (UTC)
-
|- ! width="20%" align="left" | < October 13 ! width="25%" align="center"|<<Sep | October | Nov>> ! width="20%" align="right" |October 15 > |}
|
||||||||
| The page you are currently viewing is an archive page. While you can leave answers for any questions shown below, please ask new questions at one of the pages linked to above. | ||||||||
[edit] I love my Turing Machine!
I have a task to complete which is to design a Turing Machine which will halt on all inputs from a certain language and halt and accept only on inputs from a particular subset of this language. I should mention that in the course I'm taking we've taken the option of considering a TM as a set of rules of the form {READ STATE, READ SYMBOL, CHANGE TO STATE, CHANGE TO SYMBOL, GO LEFT OR RIGHT OR PAUSE} with a "start" state and an "accept" state, the machine starting on the "left-most" letter of the input word, and the machine halting without accepting if it encounters a symbol in a certain state for which there does not exist a rule.
Anyway, I've completed the task, and designed a TM. I'm happy with it - I think it's quite cute in fact. And I should think anyone reading my rules with the accompanying commentary would be happy too. What I would like to do is make a systematic and complete justification of my TM - i.e. prove that it does exactly what it's meant to. The trouble is, when I start writing about it I end up with paragraph upon paragraph of flowery prose and going round in circles. This is silly. It's a simple machine really and is dealing with a simply defined subset of a simple language.
So, my question is this: does there exist a standard approach to justifying a machine of this type which would be concise and rigorous? It's bugging me since I love my machine and it clearly (to me) does its job but I end up going round in circles trying to justify it.
Thanks --87.194.21.177 01:04, 14 October 2006 (UTC)
- There's no systematic way to prove a Turing machine does what it's supposed to do. As you know, there's no general method for even proving that a Turing machine terminates. And writing proofs is hard.
- Can you do a structural induction proof to show your machine works? That is, show it works for simple cases, and then any expansion of those simple cases must also work?
- In any case, you might have to do two proofs - first to show that the machine accepts everything it's supposed to, and a second proof to show that it rejects everything it's not supposed to. --Robert Merkel 01:19, 14 October 2006 (UTC)
-
- Assuming that the TM design is indeed simple, I expect the structure of a nice proof to depend mostly on the nature of the language and its subset. Does the head move to and fro? Is auxiliary data written to the tape? A possible approach may be to come up with an invariant: a predicate that is true for the initial configuration and is preserved by each step, and that implies for a final configuration that the machine is halted in the right acceptance condition. This has to be supplemented with a variant function, a mapping from the space of configurations to some domain with a well order, such that the function value decreases on each step. If a proof can be given at all, it can be put in this form. --LambiamTalk 01:33, 14 October 2006 (UTC)
-
-
- As a matter of the fact, I would have felt fairly sure that the langie and its subset are regular, if it were not for the phrase 'halts on all input', which seems to indicate that no word in the language has a proper left subword. Now, it might still be regular, of a very simple structure; e.g., there could be one letter that stands at the end of each word, but only there. If you may strip down the verification to the recognition of a regular language, you may construct a finite automaton doing this, and then verify that the Turing machine accepts the same language.
- Of course, this is not very helpful, unless you have learned how to relate a finite automaton with a regular language. JoergenB 04:08, 14 October 2006 (UTC)
-
Thanks guys. I don't know about regular languages - maybe I'll dip a toe. Meanwhile I think I'll start thinking along the other lines suggested. I think that, as Robert says above, "writing proofs is hard" is the essential truth I am struggling with as per usual. Thanks again. --87.194.21.177 15:37, 14 October 2006 (UTC)
[edit] Elasticity of substitution
I understand that the Elasticity of substitution is the % change in x/y over the % change in the rate of technical substitution, or MRS, but then I become confused when it is simplified to: d ln x/y over d ln f(x)/f(y).
Could someone state this in terms of operations, or what I should calculate if all I have is their production function and conditional input demand functions? Thanks, ChowderInopa 02:03, 14 October 2006 (UTC)
- Hmm...let's try this: take some variable x, and some function of that variable y(x).
 . Does this help? --HappyCamper 04:30, 14 October 2006 (UTC)
. Does this help? --HappyCamper 04:30, 14 October 2006 (UTC)
- If it helps you: interpret "d ln x/y over d ln f(x)/f(y)" as: (d (ln x/y) / dx) over (d (ln f(x)/f(y)) / dx), that is, as the quotient of two ordinary d/dx forms. --LambiamTalk 11:10, 14 October 2006 (UTC)
- Further, the notation "f(x)/f(y)" is misleading. This should be something like "Ux/Uy", the ratio of two partial derivatives of the utility function U in x and y. --LambiamTalk 11:24, 14 October 2006 (UTC)
Lambiam, you are right, the bottom is the partial derivatives of the utility function, my bad. I'm still not understanding though...
I am taking the derivative of the ln(x/y) with respect to what? and then, I am dividing this by the derivative of the ln of the ratio of the partial derivatives of the Utility function??? Help! ChowderInopa 23:57, 14 October 2006 (UTC)
- I don't know the meaning of the variables here, but in any case, for the formula to make sense, there has to be something coupling x and y, making them dependent on a common variable. It could be that y is a function of x, or x and y both are functions of t (say time). If x and y both depend on a common variable (like x or t), just take the derivatives w.r.t. that variable. --LambiamTalk 18:59, 15 October 2006 (UTC)
[edit] Permutations
hello.can you pls give me instant tricks of solving permutations...
- Hello, our permutation article tells : It is easy to count the number of permutations "P" of size r when chosen from a set of size n (with r ≤ n).
- The formula is P(n,r) = n! / (n-r)! where "!" means factorial.
- Our factorial article tells that n! = Π k=1, n, k) where Π "capital Pi" means multiplication, giving n! = 1*2*...(n-1)*n.
- One easy trick I'm thinking of is just solving with your brain when, say, n < 10, else using a spreadsheet or any computer algebra system . Does that help ? --DLL .. T 18:12, 14 October 2006 (UTC)
- Can you explain what you mean by "solving permutations"? Could you give an example of how to solve one (simple) permutation? --LambiamTalk 20:15, 14 October 2006 (UTC)
[edit] Linear vector spaces
I am learning about linear vector spaces at university at the moment, and was wondering about slightly odd bases, such as {sin(t), cos(t)}. What are the coordinates of the function f(t) = 3 sin(t) + 5 cos(t) with respect to these basis {sin(t), cos(t)}, for example. Is the answer simply (3,5)? Batmanand | Talk 13:27, 14 October 2006 (UTC)
- Yes. The coordinates are just the amounts you need to multiply every vector in the base and add together to get your desired vector. Note that you need an ordered base, that is, (sin, cos) and not {sin, cos}. -- Meni Rosenfeld (talk) 13:37, 14 October 2006 (UTC)
- Your last statement is merely a matter of taste.--gwaihir 13:59, 14 October 2006 (UTC)
- Taste? How can you tell if (3, 5) means 3 sin(t) + 5 cos(t) or 3 cos(t) + 5 sin(t) if the base is {sin(t), cos(t)}, which is of course equal to {cos(t), sin(t)}? -- Meni Rosenfeld (talk) 14:02, 14 October 2006 (UTC)
- If you use unordered bases, sets of co-ordinates are functions on the basis, so it's not (3, 5) but rather (sin → 3, cos → 5) (in either order).--gwaihir 15:27, 14 October 2006 (UTC)
- Very well, but he was specifying his expectation to have (3, 5) as the coordinates vector, which can only work if the base is ordered. So, in general it is a matter of taste, but not within the context of this question. -- Meni Rosenfeld (talk) 18:34, 14 October 2006 (UTC)
- If you use unordered bases, sets of co-ordinates are functions on the basis, so it's not (3, 5) but rather (sin → 3, cos → 5) (in either order).--gwaihir 15:27, 14 October 2006 (UTC)
- Batmanand, just to make sure you made a typo and didn't commit one of the beginner's most common mistakes, when you wrote these basis: {sin(t), cos(t)} is one basis. The basis consists of two basis vectors (which in this case may be called basis functions). You'll soon meet situations where you consider several bases simultaneously, but then you should notice that that means several collections of basis vectors. JoergenB 14:42, 14 October 2006 (UTC)
-
- And it's bases in plural, isn't it? Of course, when unsure of the number, you could write these basis and say that one or the other was just a typo. ;-) In any case, I'm not very fond of writing vectors as a sequence of coordinates (like "(1,5,3)"), because I seem to never know which basis I (or someone else) was referring to anyway. If my example was implying the basis vectors
 ,
,  and
and  (in that order) I prefer
(in that order) I prefer  . This way you can also mix basis vectors from different bases in the same expression. —Bromskloss 19:59, 15 October 2006 (UTC)
. This way you can also mix basis vectors from different bases in the same expression. —Bromskloss 19:59, 15 October 2006 (UTC)
- And it's bases in plural, isn't it? Of course, when unsure of the number, you could write these basis and say that one or the other was just a typo. ;-) In any case, I'm not very fond of writing vectors as a sequence of coordinates (like "(1,5,3)"), because I seem to never know which basis I (or someone else) was referring to anyway. If my example was implying the basis vectors
-
-
- Not to mention what happens if the vector space isn't of finite dimension. You'd have a hard time writing out the whole coordinate sequence then, whereas by using the other way you can use a summation symbol. —Bromskloss 20:04, 15 October 2006 (UTC)
-
-
-
-
- I don't think that's really relevant; if you can write
 , surely you could also write the sequence (not the set)
, surely you could also write the sequence (not the set)  of coordinates? Moreover, for an uncountable basis, there's no way to write the sum (although in some cases an integral can be substituted), but you can still use a coordinate-like function f(t) of some continuous variable t (see, for example, Fourier transform and Laplace transform, although I'm not sure they can precisely be called bases). --Tardis 15:20, 16 October 2006 (UTC)
of coordinates? Moreover, for an uncountable basis, there's no way to write the sum (although in some cases an integral can be substituted), but you can still use a coordinate-like function f(t) of some continuous variable t (see, for example, Fourier transform and Laplace transform, although I'm not sure they can precisely be called bases). --Tardis 15:20, 16 October 2006 (UTC)
- I don't think that's really relevant; if you can write
-
-
[edit] d2/dt2 = H d2 / dX2
d2/dt2 * ß = H * d/dx * ß, Solve for H205.188.116.136 14:36, 14 October 2006 (UTC)
- What is ß and what is H? Functions? Constants? --HappyCamper 15:32, 14 October 2006 (UTC)
- And what's with the asterisk? Some kind of convolution operation? --LambiamTalk 15:45, 14 October 2006 (UTC)
- Assuming you mean
- it might help to apply the method of separation of variables; compare how the wave equation is solved for the case of one space dimension. --LambiamTalk 16:06, 14 October 2006 (UTC)

-
-
- Well, if they're functions there's simply no general solution. Separation of variables can't be applied if the solution is inseparable, and there's no reason to automatically assume it is. To solve it, you'll need some conditions. --BluePlatypus 01:33, 18 October 2006 (UTC)
-
[edit] alpha level increase power?
Hi:
I am sitting on my desk, trying to figure out the following statistics problem: if the alpha level increases power also does. Now, I wonder whether power can be less than the alpha level for a hypothesis test. I think it cannot be less as they are somewhat related and depend on each other. But I am not 100% sure. Does anyone know anything that would illuminate my mind and refresh my brain cells a little? I would be thrilled. Thanks much. Hersheysextra 16:15, 14 October 2006 (UTC)
- For the moment I can only say that if that were to turn out possible for some test, then it is a strange test. I tried to see if the impossibility follows from the usual requirement of the test statistic being a sufficient statistic, but the (presumably trivial) proof eluded me. --LambiamTalk 23:41, 14 October 2006 (UTC)
-
- As I understand it, power is 1 - beta, where beta is the risk of a Type II error, while alpha is the risk of a Type I error. Thus power and alpha aren't directly related. However, alpha would normally be less than 1 - beta, as both alpha and beta are usually small.--86.136.126.188 17:36, 17 October 2006 (UTC)
-
-
- The "alpha" is the probability of type I error, which is the probability of rejecting your null hypothesis when it is in fact true. The "power" is (1-P(type II error)), or the probability of rejecting your null hypothesis when it is false. So:
-


-
-
- means you are more likely to reject your null hypothesis when it is true than when it is false – which is obviously a pretty stupid thing to do. It is entirely possible (it might take me a few minutes to come up with a specific case, but it just depends on the critical value you choose for your test) but if you come across test that has this characteristic, it would be a smart move not to use it ;-) – AlbinoMonkey (Talk) 07:43, 18 October 2006 (UTC)
-
[edit] significance of e
There is a definition for e in wikipedia. Assume the following.
y=f(x); y=e^x; y'=x(e^(x-1));
here, acceleration of y is always equal to velocity of x. Does this point that - acceleration of y is equal to velocity of x - hold good for only e or does that hold good for all integers?
- Um, you seem to have differentiated y with respect to e, not x; I don't think that's a meaningful thing to do. Melchoir 17:02, 14 October 2006 (UTC)



-
 Richard B 18:06, 14 October 2006 (UTC)
Richard B 18:06, 14 October 2006 (UTC)
[edit] Visual Analog Linear Scale
When it was first invented ? 124.109.18.18 20:17, 14 October 2006 (UTC)
- There is an article: Sriwatanakul K, Kelvie W, Lasagna L, Calimlim JF, Weis OF, Mehta G., "Studies with different types of visual analog scales for measurement of pain." Clinical Pharmacology and Therapy 1983; 34(2):234-9. An abstract is here. I can't tell whether this presents the actual invention, but I think this article was instrumental in making them popular, at least for eliciting pain intensity judgements from patients. --LambiamTalk 23:35, 14 October 2006 (UTC)
|- ! width="20%" align="left" | < October 14 ! width="25%" align="center"|<<Sep | October | Nov>> ! width="20%" align="right" |October 16 > |}
|
||||||||
| The page you are currently viewing is an archive page. While you can leave answers for any questions shown below, please ask new questions at one of the pages linked to above. | ||||||||
[edit] The Fourth Axis
Where is the forth dimension's axis? I'm refering to the spatial dimension, not time. THL 14:56, 15 October 2006 (UTC)
- In three dimensions, the standard basis includes the unit vectors (1,0,0), (0,1,0), and (0,0,1). In four dimensions, it is similar: (1,0,0,0), (0,1,0,0), (0,0,1,0), (0,0,0,1). If you are about physical space, there is no real fourth dimension, so I don't think we have the proper words to describe it in that sense. - Rainwarrior 16:54, 15 October 2006 (UTC)
- There is no visual way to represent full 4 dimensions similarly to how we do with solids in three dimensions. You can project anything in higher dimensions to three dimensions, and you can take several 3-D slices of the 4-D object and then order them in time, but that's still just having your way around to represent the 4th dimension. ☢ Ҡi∊ff⌇↯ 17:30, 15 October 2006 (UTC)
-
-
- I'd just like to point out that modern theories say that physical space has as many as 26 dimensions, though only 3 of them are meaningful in large scales. What do you mean by "if they had found the axis"? They have found complicated explanations for more than 3 dimensions, and they have found that there is not simple explanation for them. It's not like there is any "fourth axis" hiding somewhere in the familiar euclidean 3-dimensional space. -- Meni Rosenfeld (talk) 19:17, 15 October 2006 (UTC)
-
-
-
- Well, that's easy. In parametric form, (x, y, z, w) = (0, 0, 0, t). Melchoir 19:37, 15 October 2006 (UTC)
-
-
-
-
- Yeah, and it was also implicit in Rainwarrior's reply. You can also have it in equations form, which is just as simple - in 4D it's (x = 0, y = 0, z = 0), or, if you like having a single equation, |x| + |y| + |z| = 0. -- Meni Rosenfeld (talk) 20:06, 15 October 2006 (UTC)
-
-
When it comes to math, I am very blue collar. I haven't taken anything higher than Algebra 3/4, and I got a C in that. I'm not a genius. THL 20:36, 15 October 2006 (UTC)
- In that case, I suggest you read about Flatworld [1], where there is a 2D world full of 2D creatures, and the author describes how 3D objects would appear to them. By analogy, we 3D creatures can't fully comprehend the 4th physical dimension, much less the 26th. We can, however, use that dimension in science and math calcs. StuRat 22:02, 15 October 2006 (UTC)
-
-
- Let me say that neither Melchoir nor I meant to offend you. I was only trying to suggest that before giving up, you should be as specific as possible about your question, and try to make sure we understand each other. Your first question made it unclear whether you are referring to a mathematical or a physical concept (and there's a world of difference!), and your second was just as vague. I get the impression you didn't fully understand Rainwarrior's reply, in which case the best thing to have done is to ask for an explanation. -- Meni Rosenfeld (talk) 13:45, 16 October 2006 (UTC)
-
- Well, when I suggested a set of four vectors to define an axis, if you want to create the equation of a line that passes through them, there was the parametric form above, or perhaps the more familiar equation "L = A + tB" (t can be any/every real number), where "A" is some point it passes through, and "B" is a direction. In this case, "A" is (0,0,0,0), the origin (where all four axes intersect), and "B" would be (0,0,0,1) for the fourth axis. So, L = (0,0,0,0) + t (0,0,0,1). - Rainwarrior 15:08, 16 October 2006 (UTC)
[edit] Geometry - theorems and axioms
Hello, is there anywhere I could find a quite complete list of theorems in geometry (well, euclidean geometry would suffice). I looked at geometry, euclidean geometry and on pages about Hilbert's and other's sets of axioms, but couldn't find a list of theorems. I'm not really looking for very complicated theorems, just things like that the diagonals of a square intersect perpendicularily (well not just THAT simple actually :p). I would also appreciate if someone could point out where I could find a page that would compare analytic geometry and "traditional" geometry, by saying how one would state theorems and axioms in one or the other. Thanks --Xedi 19:45, 15 October 2006 (UTC)
- There are thousands upon thousands of theorems in Euclidean geometry. You don't want a "quite complete" list, I hope. But in any case, I don't know of a list of even "notable" geometrical theorems. As to the comparison between analytic geometry and "traditional" (axiomatic) geometry: the difference is not so much in how you state the theorems but in how you go about proving them. For traditional geometry you have Euclid's axioms (Euclidean geometry#Axiomatic approach). For analytical geometry you could use any axiomatization of the real numbers, but no working mathematician thinks in terms of axioms when proving geometrical results analytically. --LambiamTalk 23:05, 15 October 2006 (UTC)
[edit] HOW DO I ADD AUTO TIME.
HOW CAN I ADD AUTO TIME TO MY CALC. I WOULD LIKE TO SIGN PEOPLE IN AND OUT AND KNOW HOW LONG THE WAIT WAS BY CLICKING A CLOCK ICON. PEGGY [email removed] —The preceding unsigned comment was added by 68.88.141.66 (talk • contribs).
- Please don't write in ALL CAPITAL LETTERS.
- Do not include your e-mail address.
- Sign your question.
And most importantly, we can't answer your question unless you:
- Be specific.
--Ķĩřβȳ♥ŤįɱéØ 21:30, 15 October 2006 (UTC)
This template must be substituted. Replace {{Reference desk navigation}} with {{subst:Reference desk navigation}}.|- ! width="20%" align="left" | < October 15 ! width="25%" align="center"|<<Sep | October | Nov>> ! width="20%" align="right" |October 17 > |}
|
||||||||
| The page you are currently viewing is an archive page. While you can leave answers for any questions shown below, please ask new questions at one of the pages linked to above. | ||||||||
[edit] What calculations were aided by John Napier's tables of logarithms?
From what I've been able to gather, these tables were very incomplete, offering only a small percentage of what would have made up a complete and adequate set (given the base, etc.). Yet histories state that they were instantly very useful for all kinds of important calculations. So, what is an actual example of calculations for which Napier's tables were complete and adequate and used? I'm guessing that either
- I've misunderstood what I've read, either mathematically or historically, and in fact Napier's tables were complete enough to do the whole range of calculations for which people used Briggsian tables before calculators.
- There was a specialized kind of navigational (etc.) problem that determined the range of numbers Napier offered.
- In fact the histories are wrong to say they were useful, and Napier produced his tables merely as a demonstration of what logarithms could accomplish, should others continue with much more industry to make much more complete tables.
Wareh 02:43, 16 October 2006 (UTC)
- Napier's table is organized in such a way that it specifically aided in the calculations required for celestial navigation using the formulas of spherical trigonometry. For more details, see our article Prosthaphaeresis. His 1616 Admirable table presents in columnar form, for α going from 0° by increments of 1' to 45°, the values of α, sin α, Log(sin α), Log(tan α), Log(cos α), cos α, 90°–α (so effectively his table goes to 90°). Here Log(_) stands for Napier's Logarithme, which is to the base of exp(–10–7). At the time, computations for celestial navigation presented the most pressing need for easier multiplication, and Napier's table fulfilled this need. His particular organization was definitely easier for this specific application, although less convenient for general, arbitrary multiplication. It is clear from the accompanying text that Napier was aware of this. --LambiamTalk 11:00, 16 October 2006 (UTC)
-
- Oh, how cool it would have been if celestial navigation was actually to navigate from star to star! :-) —Bromskloss 12:42, 16 October 2006 (UTC)
-
-
- You want astrogation. But, then again, who doesn't? --Tardis 15:22, 16 October 2006 (UTC)
-
-
- Thanks for another fine answer, Lambiam. I would love to see someone as informed as you add a couple of sentences at Logarithm#History pointing to Prosthaphaeresis, and an example at Prosthaphaeresis of a calculation using the combined resources of that method and Napier's tables. But of course I am content just to have my curiosity satisfied on this point. Wareh 15:33, 16 October 2006 (UTC)
[edit] a?
So in my math class, we're doing factorials. One of the homework problems was "a?" My friend says it means a wants to be n. Nobody knows what it actually means. Therefore, I ask you; WTF does that mean? I'm not asking for the problem to be solved, just for someone to tell me what the question mark is supposed to be.
Thank you. 64.198.112.210 15:34, 16 October 2006 (UTC)
- The Minkowski's question mark function uses the question mark symbol, but not like that. I doubt that subject would show up in your math class, anyway. My guess is that it's just a typo. ☢ Ҡi∊ff⌇↯ 15:52, 16 October 2006 (UTC)
-
- Perhaps if you can provide more context as to where and how it appears, we might figure out the intention. -- Meni Rosenfeld (talk) 21:18, 16 October 2006 (UTC)
-
-
-
- My guess is that it was typed by someone not so knowledgeable or not paying much attention. For example, the phrase "how much is a!?" may sound inappropriate for a test if the person is ignoring the fact the "!" is part of the notation of the exercise. So the typist could have just removed the "!" thinking it would make the text more "formal" (since "!?" makes it look like an overly enthusiastic question) ☢ Ҡi∊ff⌇↯ 07:38, 17 October 2006 (UTC)
-
-
[edit] Combinatorics -- the "obnoxious geek" problem
This was motivated by an annoying guy in my class I hope I never have to work with again. Here's the situation, and it could be generalized, but I'll just wonder about my specific case:
In my class of 16, we've been put into 4 groups of 4 for team projects. We'll be put into different groups of 4 a few more times throughout the semester. My question is, how many partitions of the class into groups of 4 can be made such that any 2 individuals are in the same group at most once?
The best case scenario would be 5 partitions, in which case everyone would have been in a foursome once with every other classmate. It wasn't too hard to sketch out a way to get 3.
Part of my question is even how to understand this problem or put it into rigorous terms. Does it have another name? My initial naive approach is to phrase is something like how many copies of "4 x the complete graph on 4 vertices" can the complete graph on 16 vertices be broken into, but it seems like there must be something easier.
Most importantly, can I be assured I won't have to work with annoying guy for at least 3 more iterations of these classroom teams?
Thanks! - 142.110.227.162 16:05, 16 October 2006 (UTC)
- Which of these do you mean to ask ?
-
- How many groups of 4, out of 16, can be formed without two SPECIFIC members being in the same group more than once ?
-
- How many groups of 4, out of 16, can be formed without ANY two members being in the same group more than once ?
- In the first case, you would also have to define how "different" each group needs to be. That is, can they have 3 out of 4 members the same as from the last time ? Or 2 out of 4 ? StuRat 16:42, 16 October 2006 (UTC)
I guess I wasn't clear. I want to look at "partitions" (the act of dividing the whole class into 4 groups of 4) as a whole, and consider the largest set of partitions where any group of four contains any two individuals at most once.
i.e. what's the most number of times I can partition the class before somebody, anybody, is in the same group with a person from a previous partition? (as you can see part of my problem is with notation) 142.110.227.162 17:05, 16 October 2006 (UTC)
I think three is probably it. It is easy to see that by relabelling the students, the first two partitions can always be written (1 2 3 4)(5 6 7 8)(9 10 11 12)(13 14 15 16) and (1 5 9 13)(2 6 10 14)(3 7 11 15)(4 8 12 16). There are 16×3×2 labellings that will give these for the first two partitions (16 ways to choose 1, 3 ways to choose 2, 2 ways to choose 3, 1 way to choose 4 through 16). In particular, you can permute your labelling of 1 2 3 4. I think you can show that these 4×3×2 relabellings are sufficient to put the third partition into the form (1 6 11 16)(2 7 12 13)(3 8 9 14)(4 5 10 15). It is easy to then prove that no additional partition is possible. Probably a cuter proof is, though. –Joke 20:40, 16 October 2006 (UTC)
- For dividing N people into n m-groups (so nm = N), you certainly can't do better than
 since you drain the pool of possible partners by m − 1 each time. (In your case, N = 16, n = m = 4 so that maximum is 15 / 3 = 5, as you said.) I think Joke is right that you can't get this maximum in your problem, but if n = m are prime, I'm pretty sure you can. Start by writing the objects out in a square matrix:
since you drain the pool of possible partners by m − 1 each time. (In your case, N = 16, n = m = 4 so that maximum is 15 / 3 = 5, as you said.) I think Joke is right that you can't get this maximum in your problem, but if n = m are prime, I'm pretty sure you can. Start by writing the objects out in a square matrix: ![\left[\begin{matrix}\mbox{Andy}&\mbox{Sue}&\mbox{Roger}&\dots\\\mbox{Mark}&\mbox{Louis}&\mbox{Alice}&\dots\\\vdots&\vdots&\vdots&\ddots\end{matrix}\right]](../../../math/6/8/8/68808e11db69ea50282b058454b590da.png) . Then form one partition by rows and n more by considering diagonals with various "slopes": 0 is {{Andy, Mark, ...}, {Sue, Louis, ...}, {Roger, Alice, ...}, ...}, 1 is {{Andy, Louis, ...}, {Sue, Alice, ...}, ...}, and 2 is {{Andy, Alice, ...}, ...}. You won't ever get any repeats until you have a slope of n, since n is prime. So you get
. Then form one partition by rows and n more by considering diagonals with various "slopes": 0 is {{Andy, Mark, ...}, {Sue, Louis, ...}, {Roger, Alice, ...}, ...}, 1 is {{Andy, Louis, ...}, {Sue, Alice, ...}, ...}, and 2 is {{Andy, Alice, ...}, ...}. You won't ever get any repeats until you have a slope of n, since n is prime. So you get  total partitions, as required. This isn't relevant to your original question, of course, and I don't have a formula in general (it seems to be a harder version of the derangements problem), but I thought it was interesting that the maximum is sometimes obtained and (evidently) sometimes not. As an example, the partitions formed for n = 5 from the set {0...9,'A'...'O'} is
total partitions, as required. This isn't relevant to your original question, of course, and I don't have a formula in general (it seems to be a harder version of the derangements problem), but I thought it was interesting that the maximum is sometimes obtained and (evidently) sometimes not. As an example, the partitions formed for n = 5 from the set {0...9,'A'...'O'} is
{01234, 56789, ABCDE, FGHIJ, KLMNO},
{05AFK, 16BGL, 27CHM, 38DIN, 49EJO},
{06CIO, 17DJK, 28EFL, 39AGM, 45BHN},
{07EGN, 18AHO, 29BIK, 35CJL, 46DFM},
{08BJM, 19CFN, 25DGO, 36EHK, 47AIL},
{09DHL, 15EIM, 26AJN, 37BFO, 48CGK}
- Hope this helps. --Tardis 23:25, 16 October 2006 (UTC)
Thanks for playing around with this and for your observations! (the obvious questions start popping up ... for a maximal n by n partition system, is n prime a necessary condition? for n m-groups, is the case n > m too easy and n < m too hard as far as achieving the maximum? I guess for n < m that's obvious by the pigeonhole principle.... are all maximal partitionings isomorphic? for that matter, are all partitionings isomorphic?) 68.144.123.4 01:09, 17 October 2006 (UTC)
[edit] October 17
[edit] Roman numerals
i am a standard FIFTH student. We have been assigned to make a Project Report on ROMAN NUMERALS I have found some answers to the CONTENT LIST of the Project. Please help me find answers to -- Uses of Roman Numerals; advantages & Disadvantages
Syed Bilal, Std V (E), Fr Agnel School (Vashi)
- You can start with our article on Roman numerals. Other than that, do your own homework. —Keenan Pepper 02:47, 17 October 2006 (UTC)
-
-
- How about counting being easier up to three? Fredrik Johansson 05:00, 17 October 2006 (UTC)
-
-
-
- Advantages and disadvantages compared to what? One obvious advantage of writing "XLII" rather than "42" is that it does not require extending our list of symbols beyond the Roman alphabet. However, it also limits the size of the numbers we can write. Incidentally, Google has a fun converter for small numbers. --KSmrqT 13:18, 17 October 2006 (UTC)
-
-
-
-
- The advantages would mostly be relative to the systems used previously, like drawing "bundles" of 6, 60, 360, etc. StuRat 14:02, 17 October 2006 (UTC)
-
-
-
- Addition's rather easy: just concatenate the symbols and regroup. 13 + 26 = XIII + XXVI = XXXVIIII = 39. Dysprosia 01:01, 18 October 2006 (UTC)
-
-
- But what about IIX (8) + XIII (13) ? Concat the symbols and you get IIXXIII, and changing the order to XXIIIII doesn't help at all. Taking them in that order (IIX;XIII) is exactly the same as adding 8 and 13 in the first place. – AlbinoMonkey (Talk) 11:45, 18 October 2006 (UTC)
- IIX is not the standard way of writing 8. It's usually VIII. But your point is still valid. VIII + XIII does not make VIIIXIII or any other groupiong of those letters that makes any sense to me. JackofOz 21:01, 18 October 2006 (UTC)
- But what about IIX (8) + XIII (13) ? Concat the symbols and you get IIXXIII, and changing the order to XXIIIII doesn't help at all. Taking them in that order (IIX;XIII) is exactly the same as adding 8 and 13 in the first place. – AlbinoMonkey (Talk) 11:45, 18 October 2006 (UTC)
-
-
-
-
-
- Argh yeh sorry, total mind blank on the 8 thing. XVIIIIII might make sense if you just add them up - 10 + 5 + 6x1 = 21, what I meant was when you get 4's and 9's and thus use the backwards numbering thing. Proper example - IX (9) + VIII (8) = IXVIII (?) or XVIIII (19? wrong). You could interpret IXVIII as (10+5+3)-1 = 17, which is correct, but I don't see that as any easier than adding 9+8 in the first place. – AlbinoMonkey (Talk) 21:52, 18 October 2006 (UTC)
-
-
-
-
-
-
-
-
- Are you serious? Just remove one from each. Given numbers in order, concatenate and regroup. Given numbers not in order, first cancel, then continue. So, IX+XII = X+XI = XXI. The numbers to the left are subtraction, right? And to the right is addition? So they cancel. Given something where none are available on the right to cancel, eg XIV+XX, you can generally just concatenate straight across: XIV+XX = XXXIV. There are probably other rules for special cases, but I don't see that they'd be hard to figure out on the spot. Subtraction isn't bad in Roman numerals either. As a matter of fact, glancing at the Roman arithmetic article... Black Carrot 01:29, 19 October 2006 (UTC)
-
-
-
-
-
-
- VIII + XIII = XVIIIIII = XVVI = XXI = 21 = 8 + 13 as expected. Remember (I can't remember if this is fact or not) that the Romans didn't create the "subtraction notation", ie., IV was IIII, it was some later creation. Dysprosia 02:20, 19 October 2006 (UTC)
-
-
-
-
- Ok fair enough. i stand corrected. – AlbinoMonkey (Talk) 03:07, 19 October 2006 (UTC)
-
-
- MarkCC recently wrote a short but interesting article about arithmetic using Roman Numerals: http://scienceblogs.com/goodmath/2006/08/roman_numerals_and_arithmetic.php Rasmus (talk) 10:18, 19 October 2006 (UTC)
[edit] The History of a Coin
I buy something at a store, I pay cash, and I am given in my change a 20-cent coin dated 1981. I want to come up with reasonable estimates of (a) how many times this coin has changed hands since it was first issued 25 years ago, and (b) how likely is it that I've previously had it myself during that time. I assume the answer would have to include variables such as: the number of 20-cent coins issued in 1986; the population of my country over a certain age (which itself has varied over that period); the changing relationship people are having with cash vs. credit; and surely other factors that I can't think of. Any suggestions would be welcome. JackofOz 07:53, 17 October 2006 (UTC)
- Consider what happens to a coin. It sits in someones pocket / money box for a while and then goes into a till. After that it may go back to someone elses pocket or to a bank - from whence to another shop till and pocket. I guess that larger value coins move around faster than lower denomination ones, so I would expect the 20 cents to have slowed down over its life. On average I would think that 1 movement per workday (5 per week) would be a reasonable guess. No data to back this up though. -- SGBailey 10:13, 17 October 2006 (UTC)
- Are you Australian or British? The United States did not produce a 20-cent coin in 1981, and Canada never did. If someone handed me a four-dollar bill, it wouldn't stay in circulation long! Anyway, this is a question that begs for empirical study, not mathematics. It's the kind of thing a mint could probably answer. --KSmrqT 13:49, 17 October 2006 (UTC)
- My user name is Jack of Oz. If that didn't give the game away about my Australian nationality, a quick check on my user page would have told you immediately what you wanted to know, and involved you in far less work than your international excursion through some of the major first world countries - but with fewer scenic attractions, admittedly.
- How would a mint know the answer to this better than anyone here? Mints don't keep tabs on every coin they ever produce. And how would an empirical study work? You would need 18,000 people (assuming a coin changes hands twice a day as a long-term average) - quite a management challenge. No, I really can't see how you could possibly know this with 100% precision, and even if you could, the answer would be different for every coin. But surely it's possible to come up with a reasonable estimate. Is my twice-a-day assumption reasonable? If so, that's the first part of the question already answered. Or is it? JackofOz 14:44, 17 October 2006 (UTC)
-
- Variables to be considered. Add : the mobility of people may be lesser in a small town than in a big town, the same for their pocket's contents.
- Empirical sudy : done. In 1999, each Euro country issued coins with only one identical side, the other denoting the country. Go[ogle] and find real studies about their dissemination now. --DLL .. T 18:48, 17 October 2006 (UTC)
- What does Oz have to do with australia? --frothT C 19:06, 17 October 2006 (UTC)
-
-
- Oz, similar pronunciation to Aus i.e. a shortening of Australia. And interesting that KSmrq mentions Britain - who have never issued any 20 cent coinsRichard B 22:19, 17 October 2006 (UTC)
- You may have heard of The Boy from Oz, and Oz, the satirical magazine, both so named because of their Australian connections. But this is becoming too tangential, even for a committed tangentialist such as I. The denomination of the coin isn't important. The country of issue isn't important. It's all about: If X is the number of times a coin changes hands in T years, is it possible to define X in terms of T, and if so how? JackofOz 01:21, 18 October 2006 (UTC)
- Oz, similar pronunciation to Aus i.e. a shortening of Australia. And interesting that KSmrq mentions Britain - who have never issued any 20 cent coinsRichard B 22:19, 17 October 2006 (UTC)
-
- Hmm, well obviously it all hinges upon getting some kind of good estimate on how long a coin stays with its owner. I think a decent model to arrive at that would probably divide it up into two scenarios First, coins that are in circulation, that is, in someone's wallet/pocket, in a till, or somewhere in the bank system. In that case, the coin will be changing owners at a rate which should be possible to estimate. Second scenario are coins that are taken out of circulation for a more indefinite time, that is, coins which go into people's collections or change jars. And then a number of coins that disappear out of circulation completely. You should be able to get hard figures on at least some of those values, since the currency-issuing authority of whatever country should know exactly how many coins they've minted, and have a fairly good idea of how many are in active circulation. --BluePlatypus 01:22, 18 October 2006 (UTC)
-
- ... the coin will be changing owners at a rate which should be possible to estimate. Yes, it should be possible to estimate the rate, but it's beyond my feeble powers. That's why I've come to the Ref Desk for assistance. JackofOz 23:52, 18 October 2006 (UTC)
- If the coin had a unique identifying mark, you could check every coin you get to see if it has come back. But wait! Check Currency bill tracking where currency which IS uniquely identified, gets tracked. That is a related but more tractable problem. Then there is the saying "To come back like a bad penny," i.e. the perception that one spends a "bad
-
penny and later it returns in change.Edison 23:33, 18 October 2006 (UTC)
-
-
- This is slowly creeping closer to what my question is about. I'm not interested in tracking particular coins. I am interested in coming up with a reasonable estimate of how likely it is that a T-year-old coin that has just come into my possession has been through my hands at some other time in the preceding T years. JackofOz 23:52, 18 October 2006 (UTC)
-
-
-
-
- I like the question, and I think currency (design, history, culture) is a fun topic right under our noses — which is why I enjoyed finding the links above.
- I stick by my assertion that the answer will depend on empirical data of the sort a mint might provide. That's not to say they would necessarily have on hand the answer to this specific question, but surely they must know a great deal about the statistics of coins in circulation. How many coins of a given denomination are currently in circulation? What is the typical lifetime of that coin? How does it migrate geographically? What physical properties must it have to survive the wear, and how much wear will that be? If a new coin is planned, how many should be struck to supply the needs? Coins spend some of their life in pockets, some in cash registers, some in vending machines, some in slot machines, some in jars, and some in banks. The life of a two-dollar coin likely bears little resemblance to the life of a one-cent coin. And of special interest are commemorative coins and others whose circulation is limited for reasons independent of denomination.
- Another factor is place. Surely the statistics for a major centre of commerce like Sydney will hardly resemble those of a small isolated town like Nullagine.
- I suspect counterfeit coins are extremely rare, but counterfeit bills are of great interest to the authorities, who would thus have reason to document the life of currency for their purposes.
- Sorry I don't have any definite answers for you, but I hope I've given a few useful questions. --KSmrqT 08:01, 19 October 2006 (UTC)
- Thanks, KSmrq. Seems the question will have a more complex answer than I had assumed. I will go away and work on this. In the meantime, I wonder whether your Sydney/Nullagine comparison bears inspection. Sure, within Nullagine there are far fewer places to spend your money than there are in Sydney. But it doesn't take much for a particular coin to get circulated far more widely than where it happens to be right now. Scenario: A Nullagine resident buys petrol/milk/newspaper/whatever, using a coin; the next customer at that shop, who's on their way to Perth, gets that coin in their change; in Perth, the coin is tendered, it gets given to somebody who's going to Cairns. Then it travels to Melbourne, and is put into Granny's change bottle for the grandkids; it stays there for 5 months and they get the bottle at Christmas. They take the coins to the bank, then off it goes again on its merry journey through history. JackofOz 00:58, 20 October 2006 (UTC)
-
-
[edit] Angle at centre of a tetrahedron
Given a tetrahedron ABCD, with centre at O (i.e. AO = BO = CO = DO), then what is the angle AOB? (O exsists and is unique)
I know it's *roughly* 72 degrees [EDIT: should've been 108] (which is the interior angle of a pentagon) for the following reason: at school, our chemistry department had an organic molecule construction kit. An atom of carbon was reperesented by a four-pronged star (so the ends of the star formed a tetrahdeon) and bonds / other elemnts were represented by little plastic tubes. Having joined five into a planar ring (cyclopentane), I then realised you could make up a dodecahedron using entirely carbon molecules... which I duely did. If the straws had been straight, then the above-mentioned angle would be exactly the interior angle of a pentagon. However, the straws were bent slightly outward, meaning angle AOB is actually slightly more than 72 degrees [EDIT: should've been 108]. So, what *is* the angle? Tompw 11:29, 17 October 2006 (UTC)
- Could this have been the angle between two faces, which is arccos (1/3) (about 71°)? For the angle between two spikes from the centre to a corner I find arccos (–1/3) (about 109°). --LambiamTalk 13:48, 17 October 2006 (UTC)
-
- The careful description of the molecule, a circle of five, makes it clear the central angle between vertices is really what is wanted. Since a regular tetrahedron is its own dual, the central angle between vertices should be the same as the central angle between face centers, which is 2 tan−1 √2, approximately 109.47°. That's different from the dihedral angle between faces, which is cos−1 1⁄3, approximately 70.53°. The mistake is thinking that the interior angle of a regular pentagon is 72° (that is, 360°/5), which is actually the central angle; in fact, the angle between sides is 180° − 360°/5, exactly 108°. This assumes that a ring molecule is planar, which is roughly true here, but not always. --KSmrqT 14:50, 17 October 2006 (UTC)
-
- The mistake was that the interior angle of a pentagon is 108°, not 72° (it's more than a right angle, right?). -- Meni Rosenfeld (talk) 14:15, 17 October 2006 (UTC)
-
-
- Thanks for that... everyone who has said the interior angle is 108°, not 72° is correct - I gave the central angle not the interior. Anyway, this shows that the vertex-centre-vertex angle is indeed very close to the interior angle of a pentagon. (It also shows why model dodecahedrons will apear to tessalate space). Tompw 14:38, 18 October 2006 (UTC)
-
- No one has mentioned how the angle ~109° is derived, so here goes. If you take alternate vertices of a cube, you get the vertices of a regular tetrahedron, either (+1,+1,+1), (+1,-1,-1), (-1,+1,-1), (-1,-1,+1) OR (+1,+1,-1), (+1,-1,+1), (-1,+1,+1), (-1,-1,-1). The dot product of any two of these vectors (from the same set!) is -1. The dot product of two vectors is the product of their magnitudes and the cosine of the angle between them: (√3) (√3) cos(α) = 3 cos(α) = -1; hence α=acos(-1/3). —Tamfang 01:41, 23 October 2006 (UTC)
[edit] Integration rule
Hi!
This doesn't appear anywhere in my text book, but I was wondering, would the integral of e^g(x) equal (e^g(x))/g'(x)+c? Thanks, --Fir0002 11:55, 17 October 2006 (UTC)
- No, at least not in general. To test whether the antiderivative of function f is function F, take the derivative of F and see if you get f back. So let's test. The derivative w.r.t. x of (e^g(x))/g'(x)+c is e^g(x) (1 – g"(x)/g'(x)^2), This is the same as e^g(x) precisely when g"(x) is the constant zero function. Only linear functions (that is, first degree polynomials) g(x) = ax+b have that property. So the answer is: Yes if g is a linear function; otherwise no. In fact, for many cases there is no elementary analytical expression for the antiderivative; for example if g(x) = x^2. See also List of integrals of exponential functions. --LambiamTalk 12:49, 17 October 2006 (UTC)
- OK thanks for that --Fir0002 07:39, 18 October 2006 (UTC)
[edit] Tessaract diagram
I spent 15 minutes trying to find all the cubes in that diagram on the Hypercube page just for fun. I colored each wireframe differently. Did I get them all? I'm concerned about the orange cube and the grey cube.. they don't quite match up and the cubes next to each other seem to make an impossible shape. Also should the top four points and the bottom four points be considered opposite faces of another cube?--frothT C 19:28, 17 October 2006 (UTC)
- Did you count the number of colours? There should be precisely 8 cubes there. The top and bottom squares are not squares of the same cube. Corresponding corners are connected by parallel diagonals (not drawn) of other squares, forming a 1 × 1 × √2 block. --LambiamTalk 20:13, 17 October 2006 (UTC)
[edit] physics differentiation
I know that in physics the third derivative corresponds to a "jerk", the second derivative corresponds to acceleration, the derivative corresponds to velocity, when the function itself is position. But does the antiderivative of the function mean anything? --frothT C 19:11, 17 October 2006 (UTC)
- Just the reverse. The first antiderivative of jerk is acceleration, the second is velocity, and the third is position. StuRat 22:24, 17 October 2006 (UTC)
-
- No I mean just the antiderivative of the position.
- The antiderivative of the position of a joystick is the position of whatever it controls. You could think of it as the joystick's accumulated displacement-time. And given a clever setup of cameras, you could use anything as a joystick... Melchoir 23:04, 17 October 2006 (UTC)
-
- Note that all derivatives of all positions and the position of a joystick take a value in a vector space, since they have natural 0s, but more general positions (e.g., of a galaxy) are better thought of as values in an affine space since there is no "natural" origin. A function whose codomain is an affine space can only be integrated with a weight function that integrates to 1 over the domain of the integration, thus generating a weighted average of the function's values, or a sort of centroid. (Note that the weight function in the position case must have units of inverse time, and the result is still a position.) This makes sense, as any value formed from a collection of arbitrary points in space can only be defined relative to those points rather than to some fixed reference on which the points do not depend. So in general, the antiderivative of position is meaningless, although certain definite integrals can be taken of it. --Tardis 04:45, 18 October 2006 (UTC)
-
-
-
- How does velocity require a reference position? It requires a reference frame, certainly, but all of physics requires that. The point is that it is not coordinate-system-dependent, like position is. You and I may disagree on whether a car is to the east or to the west, but we will surely agree that it is going north if it is (even if you happen to term it "left" and I happen to term it "away from Cape Town"). (I suppose that we can go farther and say that acceleration is even more "portable" in that observers in all inertial Galilean reference frames agree on it. And jerk is consistent in all uniformly-accelerating reference frames, and so on. But that's not really the same thing, since the point is that one observer can describe all of these quantities, and they all have obvious 0s except position, whose origin the observer must pick arbitrarily.) And people certainly do talk about weighted averages of velocity — or at the very least speed — with a trivial weight function
 on a regular basis. It's not that you can't take such averages of vectors; it's that they are the only kind of integrals you can take of affine objects. --Tardis 06:05, 18 October 2006 (UTC)
on a regular basis. It's not that you can't take such averages of vectors; it's that they are the only kind of integrals you can take of affine objects. --Tardis 06:05, 18 October 2006 (UTC)
- How does velocity require a reference position? It requires a reference frame, certainly, but all of physics requires that. The point is that it is not coordinate-system-dependent, like position is. You and I may disagree on whether a car is to the east or to the west, but we will surely agree that it is going north if it is (even if you happen to term it "left" and I happen to term it "away from Cape Town"). (I suppose that we can go farther and say that acceleration is even more "portable" in that observers in all inertial Galilean reference frames agree on it. And jerk is consistent in all uniformly-accelerating reference frames, and so on. But that's not really the same thing, since the point is that one observer can describe all of these quantities, and they all have obvious 0s except position, whose origin the observer must pick arbitrarily.) And people certainly do talk about weighted averages of velocity — or at the very least speed — with a trivial weight function
-
-
-
-
-
- (edit conflict) I agree with Tardis' point; it contains distinctions that get glossed over too often, and I guess I'm a guilty party. And, actually, Froth, velocity isn't meaningless without a reference position. At the heart of the definition of a derivative is the difference between two points, and the difference between two elements of an affine space is itself naturally an element of a vector space. It doesn't require a reference position to define.
- Anyway, given a path x(t) in an affine space, you could define a "generalized antiderivative" to be a path n(t) -- let's not think too hard about exactly where n(t) lives -- such that for some point On, the derivative of n(t) equals x(t) - On. If you like, this family of generalized antiderivatives would be indexed by 2 "integration constants" instead of the usual 1. So it's not such a terrible price to pay. If you're willing to introduce a "unit time", then you can probably even put n(t) in the same affine space as x(t), so that gives some meaning to my original comment about things moving around in physical space. Melchoir 06:14, 18 October 2006 (UTC)
-
-
-
-
-
-
- That's not an unreasonable idea, but it seems to me that x(t) − On is just another function
 which does live in a vector space, since it is displacement-valued rather than position-valued. Then you can integrate that as usual, although I'm not sure what physical meaning to attribute to the resulting length-time vector. I guess it's most proper to say that a definite integral of, say, acceleration is "an accumulated change in velocity" (or a velocity displacement), and that the definite integral of velocity is a displacement, not a position. The integration constants associated with the indefinite integrals represent the (relative) "affinity" of the next space, as per my discussion of "portability". When all you know is a set of accelerations, we must assume that you are in some inertial frame, but we can't say which one. So in that sense the velocities we get from you are in an affine space as well; in all cases, it is the addition of other information that allows us to turn displacements into position (or velocity) vectors, even though in a different sense the positions have less information. (I think the paradox of more/less information is resolved by the fact that while displacements are vectors, they also identify elements of an affine space: the space of positions represented by displacements from an unknown point. We have to add an origin to turn that into a vector space for one observer, even if that position space is still affine as considered independent of observer.) (The two integration constants you found are in fact the result of two composed integrations, and get you an added A + Bt just as they do in DEs.) --Tardis 17:28, 18 October 2006 (UTC)
which does live in a vector space, since it is displacement-valued rather than position-valued. Then you can integrate that as usual, although I'm not sure what physical meaning to attribute to the resulting length-time vector. I guess it's most proper to say that a definite integral of, say, acceleration is "an accumulated change in velocity" (or a velocity displacement), and that the definite integral of velocity is a displacement, not a position. The integration constants associated with the indefinite integrals represent the (relative) "affinity" of the next space, as per my discussion of "portability". When all you know is a set of accelerations, we must assume that you are in some inertial frame, but we can't say which one. So in that sense the velocities we get from you are in an affine space as well; in all cases, it is the addition of other information that allows us to turn displacements into position (or velocity) vectors, even though in a different sense the positions have less information. (I think the paradox of more/less information is resolved by the fact that while displacements are vectors, they also identify elements of an affine space: the space of positions represented by displacements from an unknown point. We have to add an origin to turn that into a vector space for one observer, even if that position space is still affine as considered independent of observer.) (The two integration constants you found are in fact the result of two composed integrations, and get you an added A + Bt just as they do in DEs.) --Tardis 17:28, 18 October 2006 (UTC)
- That's not an unreasonable idea, but it seems to me that x(t) − On is just another function
-
-
-
-
-
-
-
-
- To riff on that last bit, I suppose I can do away with my On by simply requiring the vector identity n’’ = x’. In order to recover n(t) from x(t) through that more natural identity, one doesn't integrate once; one differentiates once and then integrates twice. So they really are integration constants. How queer! Melchoir 19:38, 18 October 2006 (UTC)
-
-
-
-
[edit] Flatland
I'm reading Flatland and I'm just curious.. When the narrator moves through the linear space of lineland, the king of lineland sees only a point. When the sphere moves through the planar space of flatland, the narrator sees a line of varying length. What would us three-dimensional beings see if a four-dimensional "circle" moved through our space? A circle of varying diameter? The narrator can tell that the cross-section of the sphere that's in his plane is circular by the shading of the line... how would the shading of the four-dimensional being's cross-section appear to us, and what would it look like if we walked around it? Certainly there's a concrete answer to this question and not just theory and projections on surfaces. --frothT C 21:21, 17 October 2006 (UTC)
- When the sphere moves through a 2-d space, the intersection is a disc which appears to a 2-d 'person' as a line. When a 4-d sphere (hypersphere) moves thorugh our 3-d world, the intersection would actually be a sphere of varying size (starts as a point, grows to a max, then shrinks to a point). You might say that it would appear to us as a disc of varying size, except that with binocular vision, we would probably see it as a 3-d sphere. Madmath789 21:36, 17 October 2006 (UTC)

- For everybodys entertainment and education, here is an animation of "four-dimensional balls stacked into a 4-dimensional pyramid (5×5×5×5), animated through successive 3-dimensional cross-sections". —Bromskloss 00:49, 18 October 2006 (UTC)
[edit] statistics
Acountof malaria parasites in 100 field with a 2 mm oil immersion lensgave a mean of 35 parasites per field, standard deviation 11.6 (note that, although the counts are quantitive discrete, the count can be assumed to follow a normal distribution because the average is large). On counting one more filed, the pathologist found 52 parasites. Does this number lie outside the 95% reference range? What is the reference range? What is the 95% confidence hnterval for the mean of the population from which this sample count of parasites was drawn? —The preceding unsigned comment was added by 213.6.140.68 (talk • contribs) .
- This sounds like a homework question, so I will not give you a direct answer. However is there some part of the question which you find confusing? Do you have an approach to the question? --TeaDrinker 22:55, 17 October 2006 (UTC)


{kind=link}
{kind=link}